NATIX 与价值 29 亿欧元的电子公司合作开发开源多摄像头 WFM 系统
新兴的索拉纳 DePIN 平台现已绘制出 2.39 亿公里的全球公路网地图
- 已发布:
- 已编辑:
价值超过 29 亿欧元的法国技术公司法雷奥与索拉纳 DePIN 项目 NATIX 合作开发开源多摄像头世界基础模型 (WFM)。
通过在多摄像头、空间街道图像上训练 WFM,NATIX 和法雷奥将帮助制造商训练出更安全、更可靠的自动驾驶汽车 (AV)。
NATIX与法雷奥的合作是将Solana DePIN应用于现实世界中关键基础设施的一个具体实例,凸显了对可靠和多功能数据集日益增长的需求。
利用 Solana DePIN 培训自动驾驶汽车
虽然整个互联网都喜欢嘲笑机器人轴并抱怨自动驾驶车辆的决策,但现实情况是,自动驾驶车辆的扩散仍呈上升趋势。根据 Statistica 和 Market.us的数据,在未来五年内,自动驾驶汽车的流通数量预计将增加两倍,到 2030 年,道路上的自动驾驶汽车将超过 125,000 辆。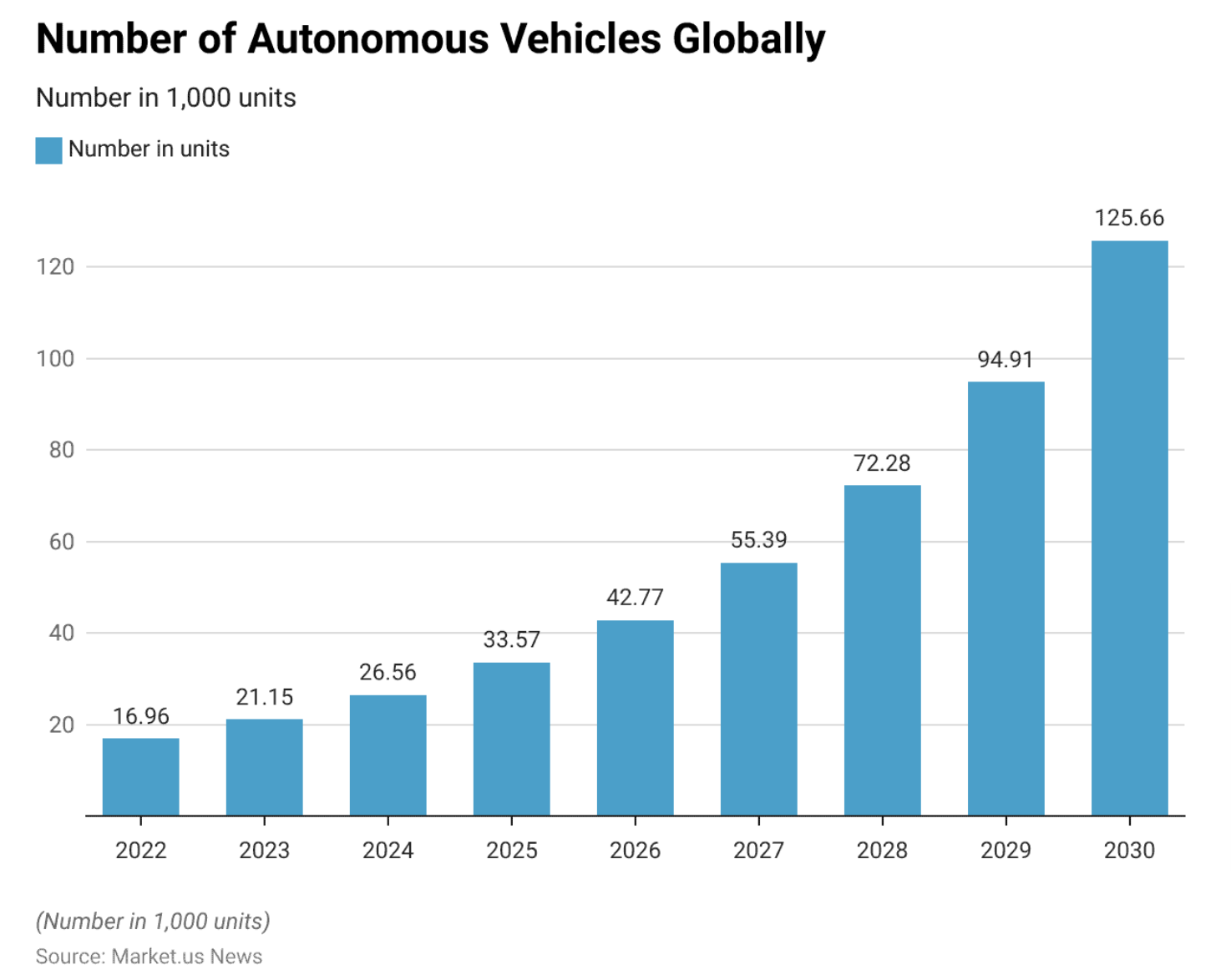
尽管有这样的预测,但自动驾驶汽车仍然存在安全隐患,至少在公众眼中是这样。DePIN 收集的数据为解决这些问题提供了潜在的途径。通过利用 NATIX&rsquo's 全球网络(该网络由遍布 171 个国家/地区的 268,000 多名驾驶员组成),制造商能够利用真实世界中可靠的街道图像对 WFM 进行培训。
“WFMs是一个千载难逢的机遇—,类似于2017–2020年LLMs的崛起:物理人工智能。凭借我们的分布式多摄像头网络,NATIX 具有明显的优势,能够比大型 OEM 移动得更快。根据法雷奥的说法,在物理世界中运行的自动机器必须学会理解四维环境,将空间和时间因素纳入决策。

通过同时对多个同步摄像头视图进行训练,ValeoxNATIX WFM 声称可以提供更细致入微的训练数据,从而提供更多真正的边缘案例;最终实现更安全的自动驾驶车辆。
“Valeo’AI 研究中心自 2018 年成立以来,一直处于汽车行业 AI 研究的前沿,尤其是在辅助驾驶和自动驾驶领域。我们的目标始终是安全、负责任地推进移动智能化。通过将法雷奥的生成式世界建模研究专长与 NATIX 的全球多摄像头数据相结合,我们正在加速提高下一代端到端 AI 模型的质量和可访问性,使研究界能够在强大的开放模型基础上进行研究。此次合作以法雷奥现有的开源框架为基础,这些框架主要是在前置摄像头视频上进行训练的:
VaViM(视频自回归模型)
VaVAM(视频行动模型)
训练数据。
在7个月内,从美国、欧洲和亚洲的真实车辆中获得多摄像头驾驶数据(60万小时的视频数据)。
NATIX全球覆盖范围超过2.39亿公里
NATIX’的新合作标志着 DePIN 项目的又一次大规模发展,该项目此前已与 Tesla 和 Grab 进行了整合。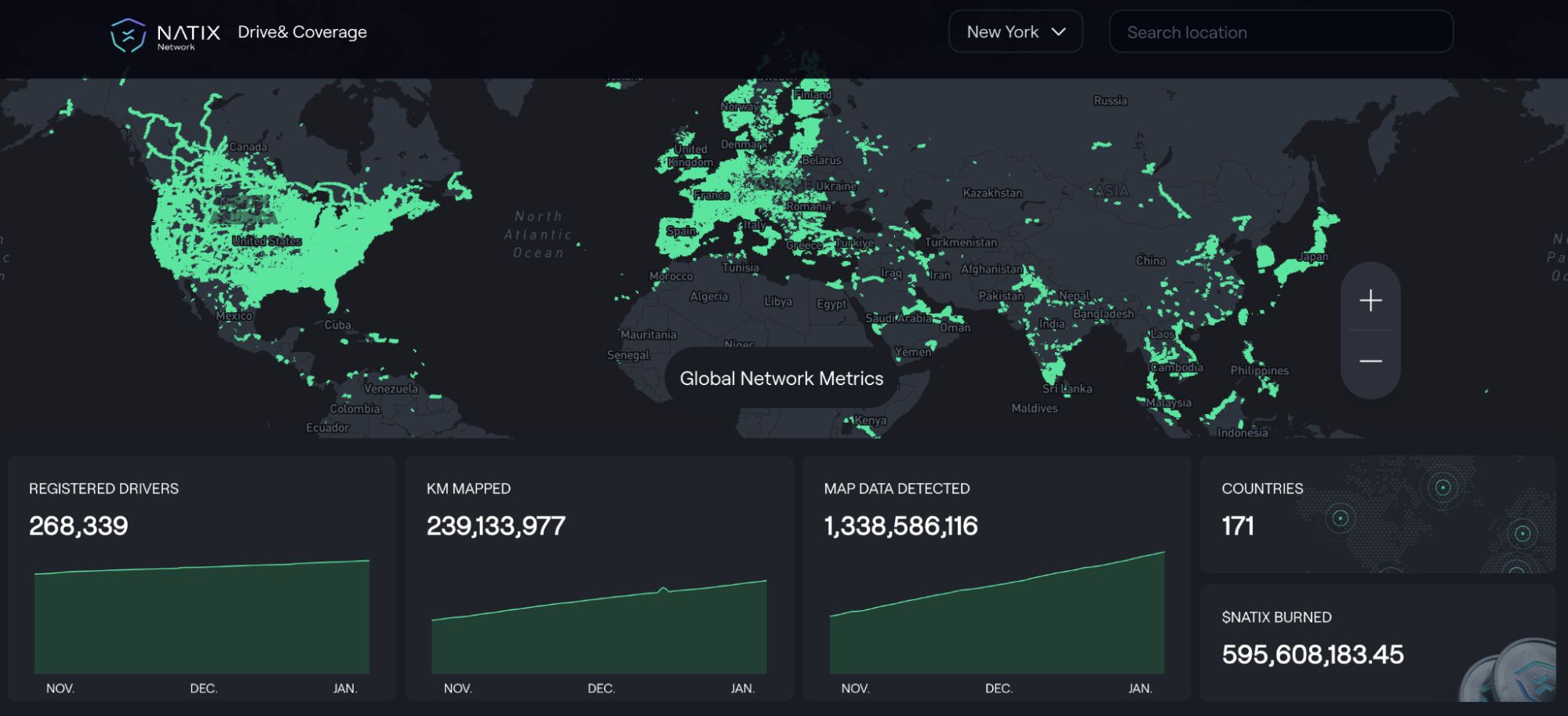
根据 NATIX explorer 的数据,DePIN 项目目前覆盖了全球超过 2.39 亿公里的道路网络,由 171 个国家的 268,000 多名贡献者提供支持。
了解有关 SolanaFloor 的更多信息
投资者正以前所未有的速度押注 $SOL随着 Marinade Finance 继续发展机构盯盘服务,Solana 盯盘率创两年新高
$SKR来了!